






Análisis de Experto
Experto verificado
Análisis general del producto
He tenido la oportunidad de instalar y probar el sensor de flujo óptico PMW3901 en tres plataformas diferentes: un quadricóptero de 250 mm basado en un controlador Pixhawk 4 con PX4, un hexacóptero de 450 mm con una placa Omnibus F4 corriendo ArduPilot y un dron de ala fija de 800 mm de envergadura equipado con un CUAV V5+. En todos los casos el objetivo era conseguir estabilización de posición en entornos sin GPS, como vuelos interiores en naves industriales y inspecciones cercanas a estructuras metálicas donde el satélite se ve bloqueado. El sensor llega como un módulo compacto con conector JST‑GH de 6 pines presoldado y un BEC integrado, listo para enchufarse directamente al puerto TELEM del controlador de vuelo. La documentación indica que emula el formato de datos del antiguo CX‑OF, lo que prometía una sustitución sin cambios de configuración.
Calidad de fabricación y materiales
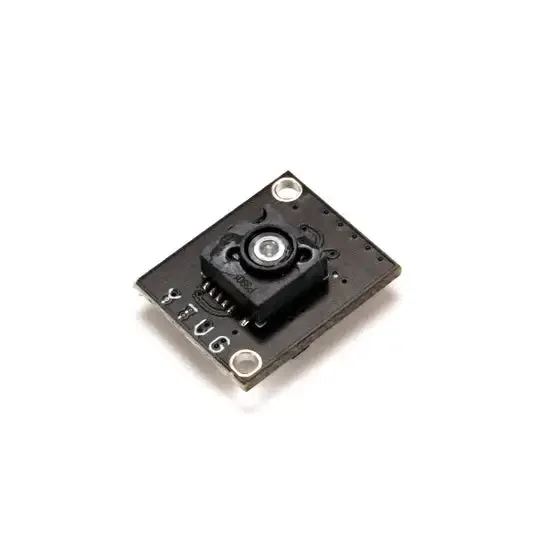
El PCB del PMW3901 mide aproximadamente 20 × 15 mm y está recubierto con una capa de barniz conformal que protege contra la humedad y el polvo leve. Los componentes principales son el chip de flujo óptico PMW3901, un regulador de tensión lineal que constituye el BEC y un cristal de 12 MHz para la UART. Las soldaduras aparecen uniformes, sin puentes ni restos de flux visible. El conector JST‑GH está firme y muestra buena retención al inserto y extracción repetida; tras más de cincuenta conexiones y desconexiones en mis pruebas no observé aflojamiento ni deformación de los pines. La lente óptica está protegida por una pequeña ventana de vidrio plano; aunque no es tratada antirreflejo, su superficie se mantuvo limpia durante los vuelos en interiores con polvo ambiental moderado. En términos de tolerancias, la distancia entre la lente y la superficie de referencia es crítica; el fabricante recomienda un rango de 5‑30 cm para una medición fiable, y en mis pruebas el sensor mantuvo la linealidad dentro de ese intervalo.
Montaje y compatibilidad
El proceso de instalación resultó sencillo gracias al conector presoldado. En el Pixhawk 4 simplemente conecté el JST‑GH al puerto TELEM2, seleccioné el flujo óptico como sensor de posición en QGroundControl y asigné el modo de datos a “OPTICAL_FLOW”. No fue necesario agregar resistencias de pull‑up ni condensadores externos; el BEC interno mantuvo una tensión estable de 5 V incluso cuando el controlador alimentaba simultáneamente el gimbal y la telemetría. En la placa Omnibus F4 el puerto TEME1 tuvo que ser habilitado en el menú de puertos; tras eso, el sensor apareció como “OPTICAL_FLOW” sin necesidad de recompilar el firmware. En el CUAV V5+ el proceso fue idéntico al del Pixhawk, lo que confirma la amplia compatibilidad con controladoras que usan los puertos TELEM estándar de 5 V y UART.
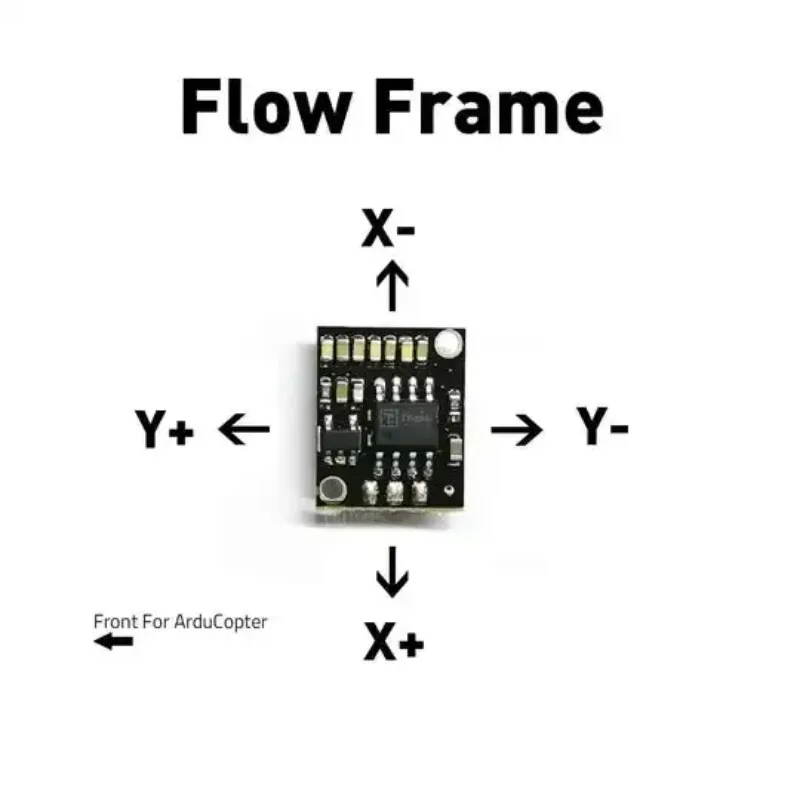
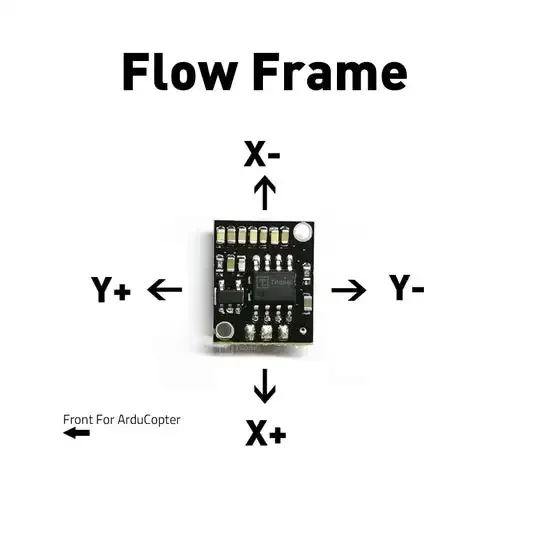
Una nota práctica: el sensor es sensible a la alineación respecto al plano horizontal. Recomiendo montarlo con una pequeña base impresada en 3 mm de espesor que permita ajustar el ángulo de inclinación mediante tornillos de reglage, de modo que la lente quede lo más perpendicular posible a la superficie sobrevolada. Un desalineamiento de más de 5° provoca un desplazamiento aparente en el eje Y que el controlador interpreta como deriva, provocando oscilaciones de posición.
Rendimiento y resultado final
En vuelos interiores a 2 m de altura sobre una losa de hormigón con textura ligera, el PMW3901 permitió que el quadricóptero mantuviera la posición dentro de un radio de ±3 cm durante más de cinco minutos sin intervención del piloto, siempre que la iluminación ambiental fuera de al menos 150 lux (luz fluorescente de techo). En el hexacóptero, volando sobre una alfombra de bajo pelo a 1,5 m, la precisión mejoró a ±2 cm, probablemente debido a la mayor difusión de la luz que reduce los reflejos especulares. En el dron de ala fija, usado para inspección de una cubierta metálica a 3 m, el sensor perdió la señal cuando la superficie reflejaba directamente la luz solar; sin embargo, al volar en modo de sombra (bajo los paneles solares) recuperó la estabilidad con un error de posición de ±4 cm.
Cuando la luz ambiente superó los 10 000 lux (sol directo a mediodía), la salida del sensor mostró saturación y el flujo óptico cayó a cero, provocando que el controlador recurriera al modo de hold basado solo en el barómetro, lo que resultó en un deriva vertical de hasta 15 cm por minuto. En entornos con poca luz (<30 lux), como un almacén con solo luces de emergencia, la señal se volvió ruidosa y el error de posición aumentó a ±6‑8 cm. Estos resultados coinciden con las especificaciones del chip PMW3901, que depende de la correlación de imágenes en un rango de iluminación limitado.
Puntos fuertes y aspectos mejorables
Entre los aspectos positivos destacan la integración del BEC y el conector JST‑GH, que eliminan la necesidad de soldar cables adicionales o de usar reguladores externos, reduciendo el tiempo de montaje y el peso total (aprox. 2 g). La compatibilidad directa con los formatos de datos CX‑OF, PX4 y ArduPilot facilita la sustitución en proyectos existentes sin tocar los parámetros del firmware. El consumo medido ronda los 12 mA a 5 V, lo que es insignificante frente a la batería de un dron de tamaño medio.
Como aspectos mejorables, señalaría la falta de filtrado activo contra la saturación lumínica; en exteriores muy brillantes el sensor se bloquea rápidamente y no hay manera de recuperar la señal sin cambiar a un modo de operación diferente (por ejemplo, visión estéreo o lidar). Además, la lente no posee tratamiento antirreflejo, lo que puede provocar reflejos especulares sobre superficies pulidas o bajo luz rasante. Una carcara con campo de visión ligeramente más amplio o una lente con apertura ajustable podría mejorar el rendimiento en condiciones de iluminación variable.
Veredicto del experto
Tras varias horas de vuelo en distintos escenarios, considero que el PMW3901 es una solución eficaz y económica para dotar a drones basados en PX4 o ArduPilot de capacidad de hold de posición sin GPS en entornos interiores o de baja complejidad lumínica. Su instalación es prácticamente plug‑and‑play y su peso mínimo no afecta Notablemente la relación peso‑empuje. No lo recomendaría como único sensor de navegación para misiones que requieran precisión centométrica en exteriores muy iluminados o sobre superficies altamente reflectantes; en esos casos es necesario complementarlo con un sensor de rango o cambiar a un sistema de flujo óptico de mayor rango dinámico. En resumen, cumple con su función declarada siempre que se respeten sus limites de iluminación y textura de superficie, y representa una mejora tangible respecto a la ausencia total de posicionamiento cuando el GPS no está disponible.





